A team of engineers at NASA’s Jet Propulsion Laboratory has outlined the decade-long development and testing of what was originally known as the Europa Lander prototype—a partially autonomous robot designed to find out if Jupiter’s moon Europa harbors life beneath its icy surface.
For many years, scientists at NASA have been investigating the possibility of sending a lander of some type to either Enceladus or Europa—both have icy crusts that cover a liquid-water ocean.
Also, they both are more highly exposed to radiation than Mars, though Europa is much more so than Enceladus—and both are extremely cold.
The design by the team called for a four-legged robot that could stabilize itself on an icy surface.
Undaunted, the team is now pushing for it to be used instead on Enceladus.
Engineers at NASA’s Jet Propulsion Laboratory have detailed the ten-year development and testing of what was initially called the Europa Lander prototype, a partially autonomous robot intended to determine whether life exists beneath the icy surface of Jupiter’s moon Europa.
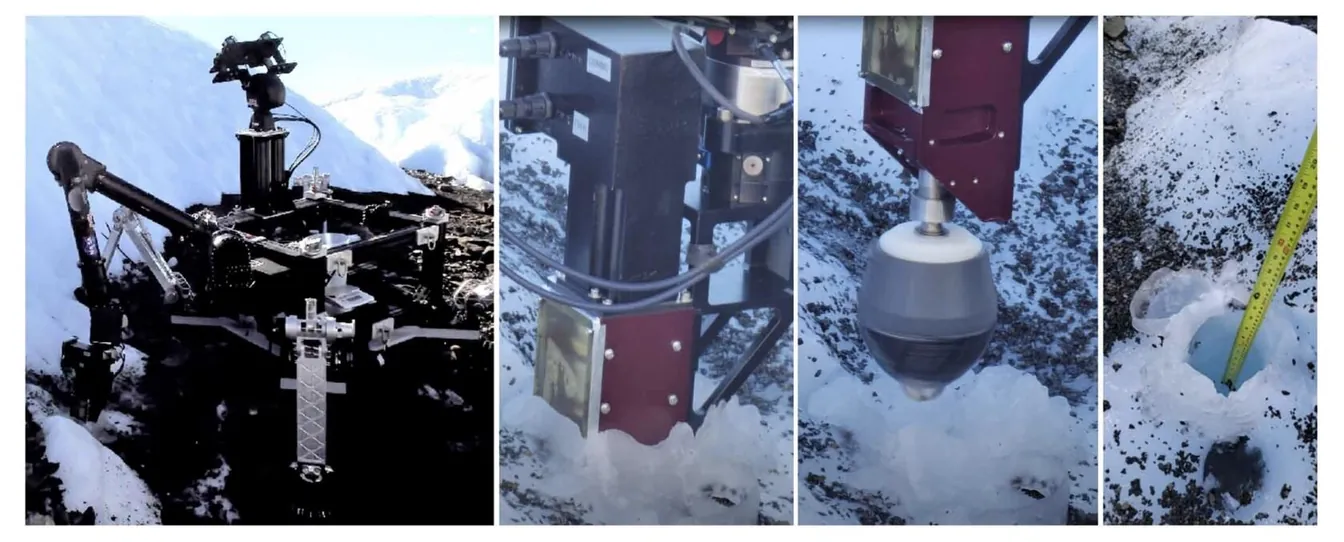
The team outlines the criteria they used to design their robot, which would drill through the moon’s icy crust and walk around its surface rather than roll, in their paper published in the journal Science Robotics. They also discuss how well it worked in Alaskan testing.
NASA scientists have been looking into the possibility of sending a lander of some kind to either Europa or Enceladus for a long time. Both planets have liquid-water oceans covered by icy crusts. Water’s presence raises the prospect of life.
But there would be some extremely difficult obstacles to overcome. Landers and communication signals would take a lot longer to reach them because they are far more distant than other locations where they have been sent. Additionally, both are very cold and have higher radiation exposures than Mars, though Europa is far more exposed than Enceladus.
Additionally, especially with Europa, the window of visibility is rather brief. However, NASA has continued its plans to develop a robot capable of performing the task, which began in 2013.
The team’s design called for a self-stabilizing, four-legged robot that could operate on ice. A stereoscopic camera with an LED light and an arm for drilling and sampling would also be included. In order to overcome the communication lags, the robot would be equipped with a computer that would enable it to walk and/or work independently for hours on end.
The team created such a robot by adding special features to almost every component, including radiation-resistant materials, sensors and response code to keep the robot stable while walking through any obstacle, and a computer-vision system to evaluate the environment, terrain, and samples gathered. Without instructions, another computer would decide what to do and how to do it.
The group’s robot had every feature they believed was essential for a journey to Europa; they tested it in their lab, on the ice in Alaska, and through simulations before being satisfied with the outcome. However, its purpose was later abandoned. Those in charge of making these choices believed that a trip to Europa was too unlikely to succeed. Unfazed, the group is now advocating for its replacement on Enceladus.
Copyright 2025 Science X Network.
You may also like...





